저희가 최종적으로 만든 코드 주소입니다. https://github.com/choinamki/plant_anomaly_detection_dji_spark_drone
choinamki/plant_anomaly_detection_dji_spark_drone
Contribute to choinamki/plant_anomaly_detection_dji_spark_drone development by creating an account on GitHub.
github.com
DJI media tutorial 코드를 참조했습니다.
https://developer.dji.com/mobile-sdk/documentation/android-tutorials/MediaManagerDemo.html
Creating a Media Manager Application - DJI Mobile SDK Documentation
If you come across any mistakes or bugs in this tutorial, please let us know by sending emails to dev@dji.com. Please feel free to send us Github pull request and help us fix any issues. In this tutorial, you will learn how to use the MediaManager to inter
developer.dji.com
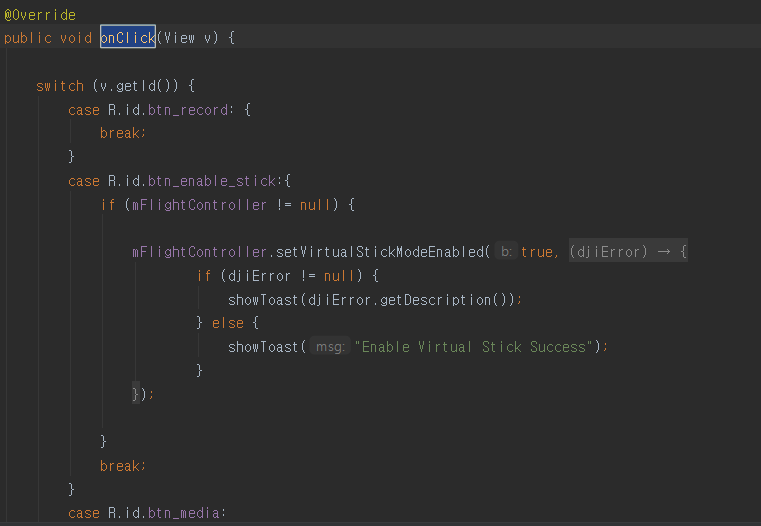
윗 코드에서 필요없는 부분을 제거하고 파일을 전송하는 코드를 만들었습니다.
MediamanagerActivity 에서 여러가지 드론에 있는 파일을 관리할 수 있습니다.


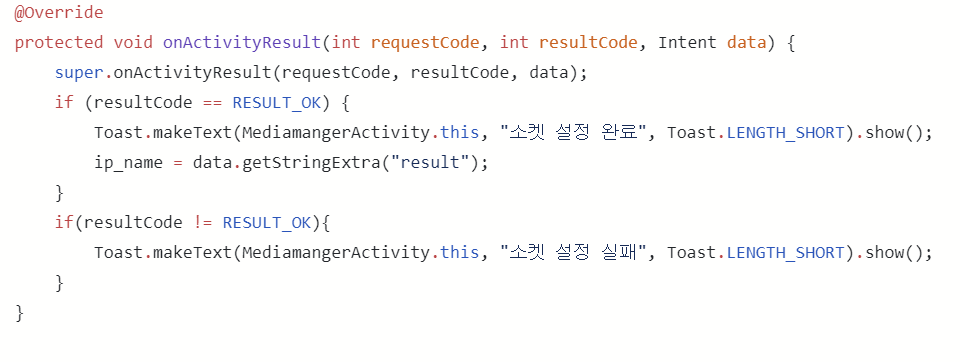
settingsoket 을 눌러서 아이피와 포트를 입력한 뒤 sendcompuetr 를 누르면 드론이 촬영한 영상과 gps데이터 텍스트파일을 설정한 서버에 보내도록 만들었습니다.
해당하는 tcp 소켓 코드는 해당 게시글을 통해 확인할 수 있습니다.
https://namki-learning.tistory.com/23?category=687501
안드로이드 java 서버컴퓨터 python tcp 통신
이정민 팀원과 같이 만들었습니다.https://jeongmin-lee.tistory.com/63 ⑦ TCP 통신 TCP 통신 Server는 Python으로 Client는 JAVA로 작성합니다. TCP통신 Client_JAVA 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17..
namki-learning.tistory.com
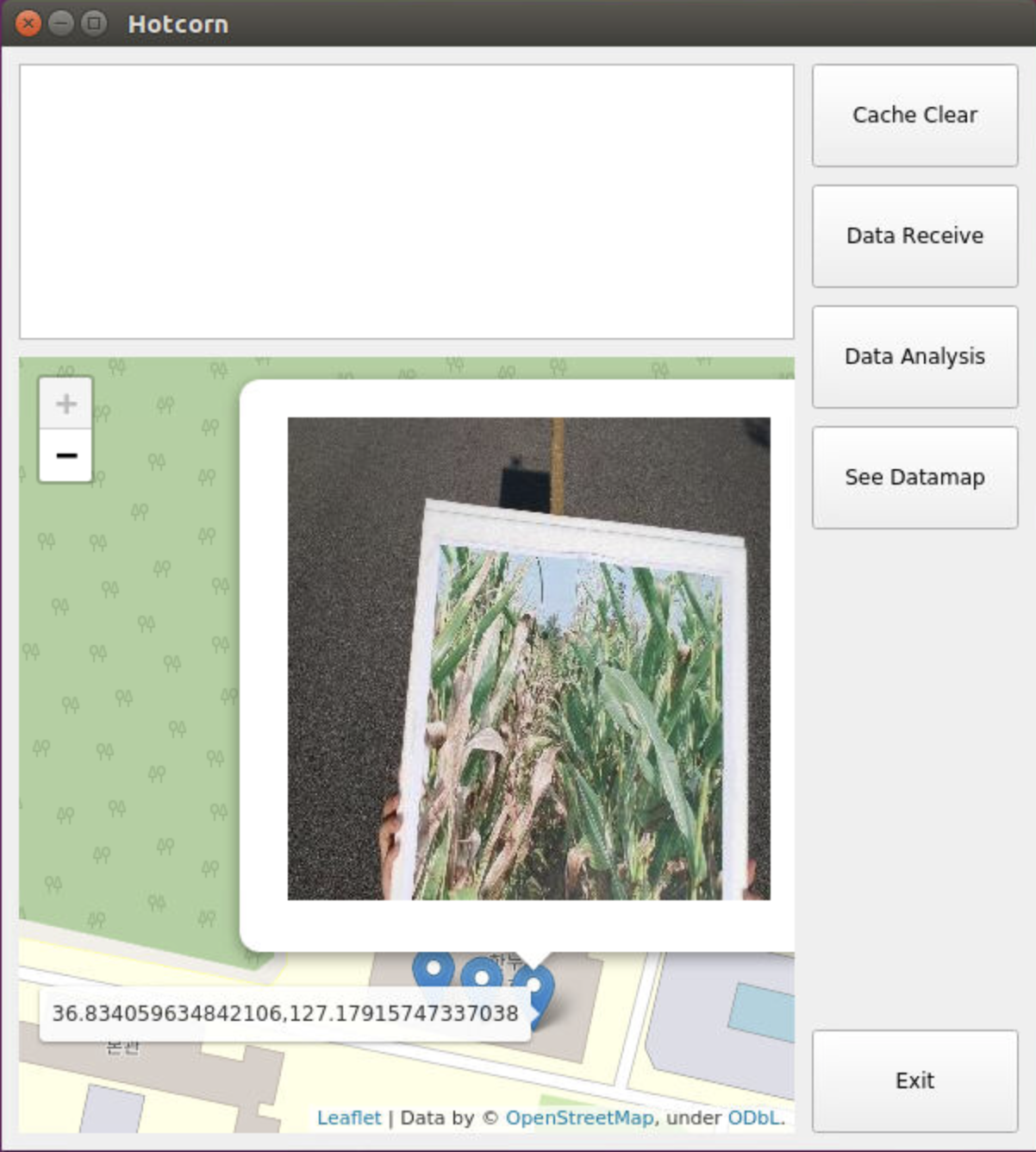
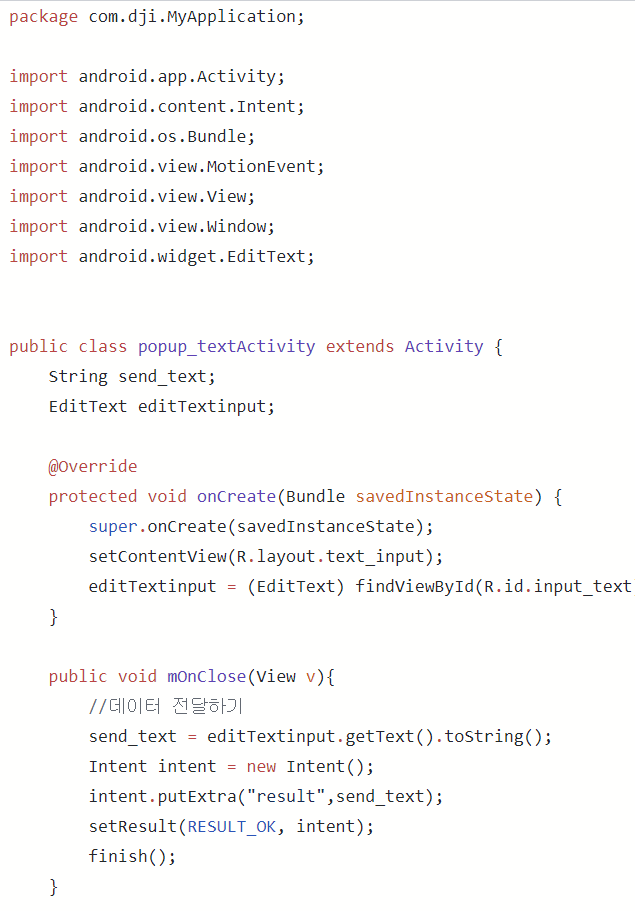
서버소켓설정은 따로 만든 뒤 intent 를 통해 popup_textActivity 로 이동하고 입력받았습니다.

이렇게 해서 드론의 영상데이터와 gps데이터를 서버 컴퓨터로 보낼 수 있었습니다.
'캡스톤_졸업작품' 카테고리의 다른 글
| 드론을 이용한 식물 이상탐지 - 드론 움직임 동작 제어 (0) | 2019.06.21 |
|---|---|
| 드론을 이용한 식물 이상탐지 - dji spark drone (0) | 2019.06.21 |
| 안드로이드 java 서버컴퓨터 python tcp 통신 (2) | 2019.06.21 |
| 드론을 이용한 식물 이상탐지 시스템 (0) | 2019.06.20 |
| 4. 라즈베리파이 블루투스 사용하기 (0) | 2018.12.23 |